|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
RADYO ELEKTRONİK VE ELEKTRİK MÜHENDİSLİĞİ ANSİKLOPEDİSİ Lazer işaretçili yarı otomatik delme makinesi. Radyo elektroniği ve elektrik mühendisliği ansiklopedisi
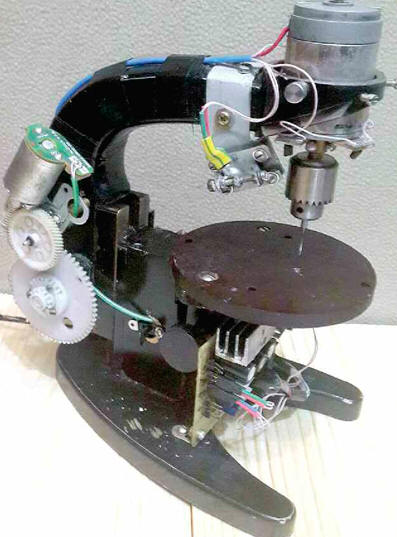
Radyo elektroniği ve elektrik mühendisliği ansiklopedisi / Ham Radyo Teknolojileri Baskılı devre kartlarında delik açmak için birçok radyo amatörü, mile bağlı bir matkap kelepçesi bulunan minyatür bir DC elektrik motoru olan mikro matkaplar kullanır. Baskılı devre kartlarını işlemek için bir araç olarak mikro matkaplar ideal olmaktan uzaktır: gelecekteki bir deliğin merkezine delmeden tam olarak girmek oldukça zordur ve bir mikro matkabın tam dikey konumunu ellerinizle elde etmek neredeyse imkansızdır. Sonuç, merkezi tahtanın diğer tarafına kaydırılmış düşük kaliteli bir "eğik" delik veya hatta kırık bir matkaptır (çok kırılgan bir malzemeden yapılmış pahalı bir karbür matkabı kırmak özellikle kolaydır) malzeme). Piyasada delme makineleri için pek çok seçenek var, ancak hepsinde manuel matkap beslemesi ve önemli bir boşluk var ve içerdikleri elektronik "destek" yalnızca bir güç kaynağı ve tahrik motoru için bir hız dengeleyicidir. Makalede açıklanan ev yapımı delme makinesi, ön karot delmeden delik açmanıza olanak tanır. Çalışma mantığı bir mikrodenetleyici tarafından kontrol edilir. Bu makinede çalışırken pahalı karbür matkaplar kırılmaz. Bu tür matkapların kullanılması sayesinde deliklerin kalitesi iyileştirilir - kelimenin tam anlamıyla deliği keserler, bu nedenle delmeden sonra folyoyu zımparalamaya gerek kalmaz, bu da baskılı iletkenlerin ince folyosunu daha da ince hale getirir. Bu makinede bir karbür matkap ucuyla (Almanya'da üretilmiştir) 1500'den fazla delik açtım ve hala kırılmadı ve yüksek kalitede delikler açmaya devam ediyor. Ucuz bir matkap genellikle folyolu fiberglasta 10-20 delikten sonra iyi delmeyi durdurur, bu nedenle matkabın dönme hızını artırmanız ve delme sırasında basıncı artırmanız gerekir, bunun sonucunda deliklerin etrafında folyo ruloları oluşur ve delme işleminden sonra iyice iletkenlerin zımparalanması gerekir. Makine (sırasıyla sol, sağ ve arkadaki görünümü Şekil 1-3'te gösterilmektedir), LOMO derneği tarafından üretilen yerli MBI-3 mikroskobu temel alınarak yapılmıştır. Çalışması, diyagramı Şekil 4'de gösterilen bir kontrol ünitesi (CU) tarafından kontrol edilir. 45. ATtiny1 mikrodenetleyicisini [XNUMX] temel almaktadır. Güç uygulandığında, kontrol ünitesi makineyi başlangıç konumuna getirir, yani hareketli kısmı alt veya ara konumdaysa otomatik olarak başlangıç üst konumuna yükselir. Daha sonra işlenen levha lazer ışınının altına konumlandırılır (lazer ışınının deliğin merkezine çarpması sağlanır), elle çalışma masasına bastırılır ve pedala basılır. Bu durumda kontrol ünitesi, matkapla aynayı ve matkap besleme motorunu çalıştıran elektrik motoruna güç sağlar. Delme işleminin sonunda matkap besleme motoru makineyi orijinal durumuna döndürür ve kontrol ünitesi her iki motora giden gücü kapatır. Makine bir sonraki deliği açmaya hazır.
Çocuk oyuncaklarında kullanılan modifiye edilmiş bir lazer modülü, lazer işaretleyici olarak kullanılmaktadır. Lazer kolimatörünü kısa bir mesafeye odaklamak ve besleme akımını sınırlamak gerekir; bu, lazerin parlamaya başlayacağı şekilde olmalıdır. Bu, daha ince bir ışın elde etmenize olanak tanır (0,2 mm'lik bir çapa ulaşmayı başardım) ve lazer radyasyonunu güvenli bir seviyeye düşürür. Lazer montaj düzeneği düzeneği Şekil 5'de gösterilmektedir. Şekil 6'te ve parçalarının çizimleri Şekil 3'de bulunmaktadır. 4. Taban 1 ve lazer tutucu 4 yaklaşık 3 mm kalınlığında çelik sacdan yapılmıştır (eski bir CD-ROM kutusunun duvarlarını kullandım). İş parçalarında gerekli delikleri açtıktan sonra, vidayı lazer modülüne takmak için tutucudaki (4) dikdörtgen yaprakları dik açılarla bükün. Modül demonte edilir, pirinç gövdesinin lehimleme alanı ve iki adet M5 somun kalaylanır. Vidayı 3 (M28x8) tutucunun 5 bükülmüş yapraklarının deliklerine yerleştirin ve her iki somunu 2 tutucunun gözleri arasına gelecek şekilde vidalayın (bkz. Şekil 5). Lazer gövdesi 8, vidanın XNUMX altına (somunlar XNUMX arasına) yerleştirilir ve tutucuya sıkı bir şekilde oturacak şekilde somunlar ona lehimlenir (bu, ayarlama işlemi sırasında vida döndürüldüğünde lazerin boşluksuz hareketi için gereklidir) .
Daha sonra, vidanın (5) çıkıntılı ucuna iki somun (1) daha vidalanır (bunlardan biri kilit somunu olacaktır) ve tutucunun (4) gözleri vidanın (5) eksen boyunca hareket etmesine izin vermeyecek şekilde sıkılır. . Artık vida saat yönünde ve ters yönde döndürüldüğünde lazer modülü bir gözden diğerine hareket edecektir. Tutucuyu lazerle birlikte tabana (3) takmak için, arka tarafa dört somun lehimlenmiştir (bunlar Şekil 2'de açıkça görülmektedir). Daha sonra lazer tarafından tutucunun ilgili deliklerine kafaların altına yerleştirilmiş 7 rondelalı dört vida 3 (M15x6) yerleştirilip üzerlerine silindirik sıkıştırma yayları yerleştirildikten sonra tabana lehimlenen somunlara vidalanırlar. Artık lazerin konumunu farklı yönlere ayarlamak için vidaları kullanabilirsiniz. Birleştirilmiş yapı tüp tutucu üzerinde (mikroskopun üst kısmı) denenir, lazer tutucunun tabanının sapı bunun etrafında bükülür ve keskin bir çizici kullanılarak tabandaki deliklerin konturları tüpe aktarılır. tutucu, içine 2,5 çapında ve 10 mm derinliğinde iki delik açılır ve bunlara M3 diş kesilir. Son olarak lazer tutucunun tabanını M3 vidalarla mikroskoba sabitleyin. Matkabı beslemek için VCR'den sonsuz dişliye sahip bir elektrik motoru kullanıldı (Cihazı uzun zaman önce söktüm, bu yüzden adını belirtemiyorum). Bu mekanizma (Şekil 7), iç ve dış M4 dişlere sahip üç metal ayak ve aynı sayıda M4 vida kullanılarak mikroskop tüpü tutucusuna sabitlenir. Dişli mikroskop sapına üç adet M2,5 vida ve somunla sabitlenmiştir; her iki parçadaki delikler de açıktır. Montaj sırasında dikkatli olunmalıdır; dişli ve kolun yanlış hizalanması minimum düzeyde olmalıdır.
Besleme hızı, R11 kesme direnci tarafından kontrol edilir. Kullanılan elektrik motoru düşük güçlüdür (nominal voltaj - 6 V, akım - 30 mA), ancak sonsuz dişli kutusu sayesinde göreviyle oldukça iyi başa çıkmaktadır. Dişli kutusunun tasarımı herhangi bir şey olabilir, ancak mikroskop kolunu kolayca döndürmek için yeterli gücü sağlamalıdır. Step motor kullanabilirsiniz. İlk projede aynen öyle yaptım ancak mevcut step motorun şaftındaki tork yetersizdi ve uygun olanı bulmak mümkün olmadı. Step motor kullanmayı düşünen varsa editörler aracılığıyla benimle iletişime geçebilir. Proje dosyaları korunmuştur. ATmega8 mikro denetleyicisini kullandı. Kompozit transistör VT5VT6 üzerindeki anahtar, matkap besleme motorunu açıp kapatır (XP6 fişine bağlıdır), transistör VT2 ve K1 rölesi yönünü kontrol eder: yukarı veya aşağı. Kompozit transistör VT3VT4 üzerindeki anahtar, matkap sürücüsünün elektrik motorunu kontrol eder (XP3 fişine bağlıdır), DA1 mikro devresine ve VT1 transistörüne bir hız dengeleyici monte edilir ve frekans, R1 ayar direnci tarafından düzenlenir. Örneğin [2]'de önerildiği gibi daha karmaşık bir dönüş hızı stabilizatörü kullanmanın bir anlamı yoktur, çünkü matkabı "gözle" deliğin merkezine "hedeflemeye" gerek yoktur. Bu konuyla ilgili deneyler yapıldı. DA6 yongası, matkap besleme motoru [3] için bir güç kaynağı voltaj dengeleyicisi içerir. Seri bağlı entegre stabilizatörler DA2 ve DA5, sırasıyla 12 ve 5 V'luk stabilize voltajlar elde etmek için tasarlanmıştır. Bunlardan ilki, DA3, DA4 mikro devrelerindeki mevcut stabilizatörlere güç vermek için kullanılır, ikincisi mikro denetleyiciye ve VT2 transistörünü açın. Kondansatörler C2, C3, C6 filtreliyor, geri kalanı engelliyor. Makine LED aydınlatma kullanıyor. Arka ışık akımı ve lazer akımı stabilize edilmiştir: lazer akımı dengeleyici DA3 çipine monte edilmiştir ve arka ışık LED'leri DA4 çipine monte edilmiştir. Stabilizasyon akımı I = 1,25/R [3] formülü kullanılarak hesaplanır ve R13 ve R14 dirençleri seçilerek ayarlanır. Stabilize edilmiş akım sayesinde aynı tipteki birkaç arka ışık LED'ini seri olarak bağlamak mümkündür. Lazer XP4 fişine bağlı, LED'ler XP5'e bağlı. XP7 konektörü bir programlayıcıyı bağlamak için tasarlanmıştır. Kontaklarının amacı "TRITON+ V5.7T USB" programlayıcıya [4] karşılık gelir. Mikrodenetleyici programı Code VisionAVR V2.05 entegre ortamında geliştirilmiştir [5, 6]. Matkabın aşırı üst ve alt konumları için iki konumlu bir sensör ve bir delme başlatma düğmesi XP2 konektörüne bağlanır. İkincisi, kontaklar 2 ve 4'e, üst konum sensörü - kontaklar 1 ve 4'e, alt konum sensörü - kontaklar 3 ve 4'e bağlanır. Sensör ve düğme, tetiklendiğinde ortak bir bağlantıya bağlanan normalde açık kontaklara sahiptir. tel. Pedala monte edilmiş bir limit anahtarı düğme olarak kullanılır. Konum sensörü bir müzik merkezinin DVD oynatıcısından kullanılır. Sensörün alt konumda tetiklenmesi, matkabın işlenen levhanın 1 mm'den fazla altına düşmeyeceği şekilde ayarlanır. Üst konum sensörü matkabın maksimum strokunu düzenler, 20 mm'den fazla yapmanın bir anlamı yoktur. Ayarlama, braket 3 üzerine vidalar 8 (M6) ile sabitlenmiş elastik telden 3 (Şekil 5) yapılmış standların hareket ettirilmesiyle yapılır. Vidalar, braketteki bir yuva içinden dişli dikdörtgen plakalara vidalanır; durakları yukarı ve aşağı hareket ettirmek için. Vidaları (6) sıkarken somunların dönmesini önlemek için direklerin konumu herhangi bir alet kullanılmadan bulunan pozisyonda sabitlenebilmesi için standart somunlar yerine dişli plakalar kullanılır. Plakalar somunlara lehimlenebilir. Braket, vidalar (4) ile tüp tutucuya sabitlenir ve sensör (2), mikroskobun tabanına vidalanan L şeklinde bir brakete sabitlenir. Braket 5'in çizimi Şekil 9'de gösterilmektedir. XNUMX, lazer tutucu parçaları gibi çelik sacdan yapılmıştır.
Makinenin güç kaynağı voltajı, kullanılan matkap tahrik motoruna bağlıdır ancak 14 V'tan düşük olmamalıdır. Nominal besleme voltajı 24 V olan bir Canon mürekkep püskürtmeli yazıcının yazıcı kafasını hareket ettiren motorunu kullandım. Makinenin besleme voltajı 30 V'luk bir ayar marjı ile seçilir. Akım tüketimi, kararlı durumdaki (delme) cihazın toplam tüketimidir - 1,5 A, motorlar çalıştırıldığı anda kısa süreliğine 3 A'ya yükselir. Bu nedenle, güç kaynağının en az 30 A akım tüketimiyle 3 V'luk bir çıkış voltajı sağlaması gerekir. 0...50 V, 0...10A doğrusal dengeleyiciye sahip ev yapımı bir anahtarlama laboratuvarı güç kaynağı kullanıyorum. Akım sınırlaması motorların sorunsuz çalışmasını sağlar. Kontrol ünitesi parçaları, Şekil 10'de gösterilen çizime göre yapılmış, tek taraflı folyo kaplı fiberglastan yapılmış bir baskılı devre kartı üzerine monte edilmiştir. XNUMX. Basılı iletkenlerin deseni, bir fotoğraf negatifinden bir görüntünün fotorezist ile kaplanmış bir iş parçası folyosuna maruz bırakılmasıyla uygulanır. Negatif fotoğraf maskesi mürekkep püskürtmeli yazıcıda maksimum kalitede basılabilir.
Sabit dirençler R3, R7-R9, R15, seramik kapasitörler C1, C4, C5, C7 (yüzeye montaj için tüm boyut 0805) ve mikro denetleyici DD1 (SOIC8 paketinde) doğrudan baskılı iletkenlere lehimlenmiştir. Kalan dirençler MLT-0,25'tir, kapasitörler ithal oksittir. Transistörler VT1, VT4, VT6 - herhangi bir seri KT805, KT819, VT3, VT5 - VS337, VS547, 2N2222, KT315, KT3102 serisi; VT2 - BC337, 2N2222, KT630, KT815, KT972 serilerinden herhangi biri (kollektör akımının maksimum değeri, K1 rölesinin çalışma akımından az olmamalıdır). VT5VT6 anahtarı olarak KT829 veya KT972 serisinden bir transistör kullanabilirsiniz ve VT3VT4 anahtarı için herhangi bir harf indeksine sahip bir KT827 veya KT829 transistörünü kullanabilirsiniz. Röle K1 - R40-11D2-5/6, 5 V çalışma voltajına sahip herhangi bir başkasıyla ve en az 1 A anahtarlama akımı için tasarlanmış iki grup anahtarlama kontağıyla değiştirilebilir. 12 V'luk bir röleyi bağlayarak kullanabilirsiniz. üst (şemaya göre) terminali sargılarını (VD1 diyotu ile birlikte) DA3 yongasının çıkışına (pim 2) bağlar. Kontrol panosu sahnenin altına monte edilir ve M3 vidalarla köşelerden mikroskobun tabanına sabitlenir (bkz. Şekil 1). DA2 ve DA5 yongaları ısı emicilere takılıdır. Transistör VT1'in bir soğutucu ile donatılması tavsiye edilir. Masa textoliteden yapılmıştır. Bir delme makinesine dönüştürmeden önce mikroskop sökülmeli, tüp tutucunun (mikroskopun üst kısmı) hareketini engelleyen oldukça viskoz yağlayıcı madde iyice yıkanmalı ve örneğin sıvı yağlayıcı ile yağlanmalıdır. , trafo yağı. Üst kısmın hareketi mümkün olduğunca hafif, pürüzsüz ve boşluksuz olmalıdır. Matkabı sabitlemek için klasik penset kullanımından vazgeçilmesine karar verildi. 0,3-4,5 mm çapındaki matkaplar için bir Mors konik ve üç çeneli mandren kullanılır. Motor ile kartuş arasındaki bağlantı düzgün olmalıdır. İşlenmekte olan levha üzerindeki lazer noktası, vidalar kullanılarak aşağıdaki sıraya göre ayarlanır: levhanın yapıldığına benzer bir folyo fiberglas levhaya bir delik açılır, ardından lazer noktası, ayarlama kullanılarak tam olarak deliğe ayarlanır. tutucunun vidaları. Bu durumda plakayı yerinden çıkarmamaya çalışmalısınız. Deneyimlerime göre, eğer lazer noktası kaybolursa (artık folyodan yansıtılmıyorsa), o zaman lazer ışını deliğe girmiş ve ayarlanmıştır. Fiberglas laminatın kalınlığı, üretilen levhanın kalınlığıyla aynı olmalıdır. Bundan sonra, lazerin gelecekteki deliğin merkezini doğru bir şekilde göstereceğinden emin olabilirsiniz. Parçalar iyi çalışır durumdaysa ve kurulum hatasızsa kontrol ünitesinin ayar yapmasına gerek yoktur. Makine bir yıldan fazla bir süredir çalışıyor. Çalışma sırasında her iki el de serbesttir ve bu nedenle makine üzerinde çalışmak uygundur. Sık sık tahta yapmama rağmen tek bir matkabı bile kırmadım ve daha önce bu makine olmadan nasıl başardığımı hayal edemiyorum. Artık güvenle yüksek kaliteli pahalı matkaplar satın alıyorum. 50 delik açmak yarım saatten fazla sürmez. Ancak yine de dikkatli olmak gerekir; tahtayı makinenin çalışma masasına monte ederken kırılgan matkabın kırılma tehlikesi vardır - yanlışlıkla matkaba çarpma tehlikesi vardır. Bu süre zarfında tahtayı hareket ettirmediğiniz sürece, delme sırasında matkabın kırılma olasılığı düşüktür. Baskılı iletkenlerin desenini boş bir baskılı devre kartına aktarmak için mikrodenetleyici programının yanı sıra .pdf formatında negatif ve pozitif fotoğraf şablonları indirilebilir ftp://ftp.radio.ru/pub/2015/07/stanok.zip adresinden. Edebiyat
Yazar: I. Parshin
Trafik gürültüsü civcivlerin büyümesini geciktiriyor
06.05.2024 Kablosuz hoparlör Samsung Müzik Çerçevesi HW-LS60D
06.05.2024 Optik Sinyalleri Kontrol Etmenin ve Yönetmenin Yeni Bir Yolu
05.05.2024
▪ Ölçtüğü manyetik alanları bozmayan görünmez sensörler ▪ Yetiştirilen ve yenen yapay pirzola ▪ Üçüncü nesil 4nm sınıf teknolojisine dayalı DDR10 yongası
▪ sitenin bölümü Mikrofonlar, radyo mikrofonları. Makale seçimi ▪ makale Sosyal Pedagoji. Ders Notları ▪ makale Yerel doktor-terapist dükkanı. İş tanımı ▪ makale Fan durdurma sirenleri. Radyo elektroniği ve elektrik mühendisliği ansiklopedisi
Ana sayfa | Kütüphane | Makaleler | Site haritası | Site incelemeleri
www.diagram.com.ua |










 Bu makaleye yorumunuzu bırakın:
Bu makaleye yorumunuzu bırakın: